Model araçlar için 6 Kanallı, orantılı kontrollere sahip uzaktan kumanda yapımı.
Gerekli malzemeler:
2 x Arduino Nano
2 x NRF24L01 + PA Wireless Modül
2 x RC Joystick
2 x 100uF Kondansatör (10uF ile 220uF arası kullanılabilir ve 16V veya üstü olmalı)
1 x 5.5*2.5 cm delikli plaket
1 x 5*3.5 cm delikli plaket
6 kanal Verici Devre şeması:

Arduino İçin Verici Kodu:
// 6 Channel Transmitter | 6 Kanal Verici
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
const uint64_t pipeOut = 0xE9E8F0F0E1LL; //IMPORTANT: The same as in the receiver 0xE9E8F0F0E1LL | Bu adres alıcı ile aynı olmalı
RF24 radio(9, 10); // select CE,CSN pin | CE ve CSN pinlerin seçimi
struct Signal {
byte throttle;
byte pitch;
byte roll;
byte yaw;
byte aux1;
byte aux2;
};
Signal data;
void ResetData()
{
data.throttle = 12; // Motor stop | Motor Kapalı (Signal lost position | sinyal kesildiğindeki pozisyon)
data.pitch = 127; // Center | Merkez (Signal lost position | sinyal kesildiğindeki pozisyon)
data.roll = 127; // Center | merkez (Signal lost position | sinyal kesildiğindeki pozisyon)
data.yaw = 127; // Center | merkez (Signal lost position | sinyal kesildiğindeki pozisyon)
data.aux1 = 127; // Center | merkez (Signal lost position | sinyal kesildiğindeki pozisyon)
data.aux2 = 127; // Center | merkez (Signal lost position | sinyal kesildiğindeki pozisyon)
}
void setup()
{
//Start everything up
radio.begin();
radio.openWritingPipe(pipeOut);
radio.setAutoAck(false);
radio.setDataRate(RF24_250KBPS);
radio.setPALevel(RF24_PA_HIGH);
radio.stopListening(); //start the radio comunication for Transmitter | Verici olarak sinyal iletişimi başlatılıyor
ResetData();
}
// Joystick center and its borders | Joystick merkez ve sınırları
int mapJoystickValues(int val, int lower, int middle, int upper, bool reverse)
{
val = constrain(val, lower, upper);
if ( val < middle )
val = map(val, lower, middle, 0, 128);
else
val = map(val, middle, upper, 128, 255);
return ( reverse ? 255 - val : val );
}
void loop()
{
// Control Stick Calibration | Kumanda Kol Kalibrasyonları
// Setting may be required for the correct values of the control levers. | :Kontrol kolların doğru değerleri için ayar gerekebilir.
data.throttle = mapJoystickValues( analogRead(A0), 12, 524, 1020, true ); // "true" or "false" for signal direction | "true" veya "false" sinyal yönünü belirler
data.roll = mapJoystickValues( analogRead(A3), 12, 524, 1020, true ); // "true" or "false" for servo direction | "true" veya "false" servo yönünü belirler
data.pitch = mapJoystickValues( analogRead(A2), 12, 524, 1020, false ); // "true" or "false" for servo direction | "true" veya "false" servo yönünü belirler
data.yaw = mapJoystickValues( analogRead(A1), 12, 524, 1020, false ); // "true" or "false" for servo direction | "true" veya "false" servo yönünü belirler
data.aux1 = mapJoystickValues( analogRead(A6), 12, 524, 1020, true ); // "true" or "false" for servo direction | "true" veya "false" servo yönünü belirler
data.aux2 = mapJoystickValues( analogRead(A7), 12, 524, 1020, true ); // "true" or "false" for servo direction | "true" veya "false" servo yönünü belirler
radio.write(&data, sizeof(Signal));
}
6 kanal Alıcı Devre Şeması:
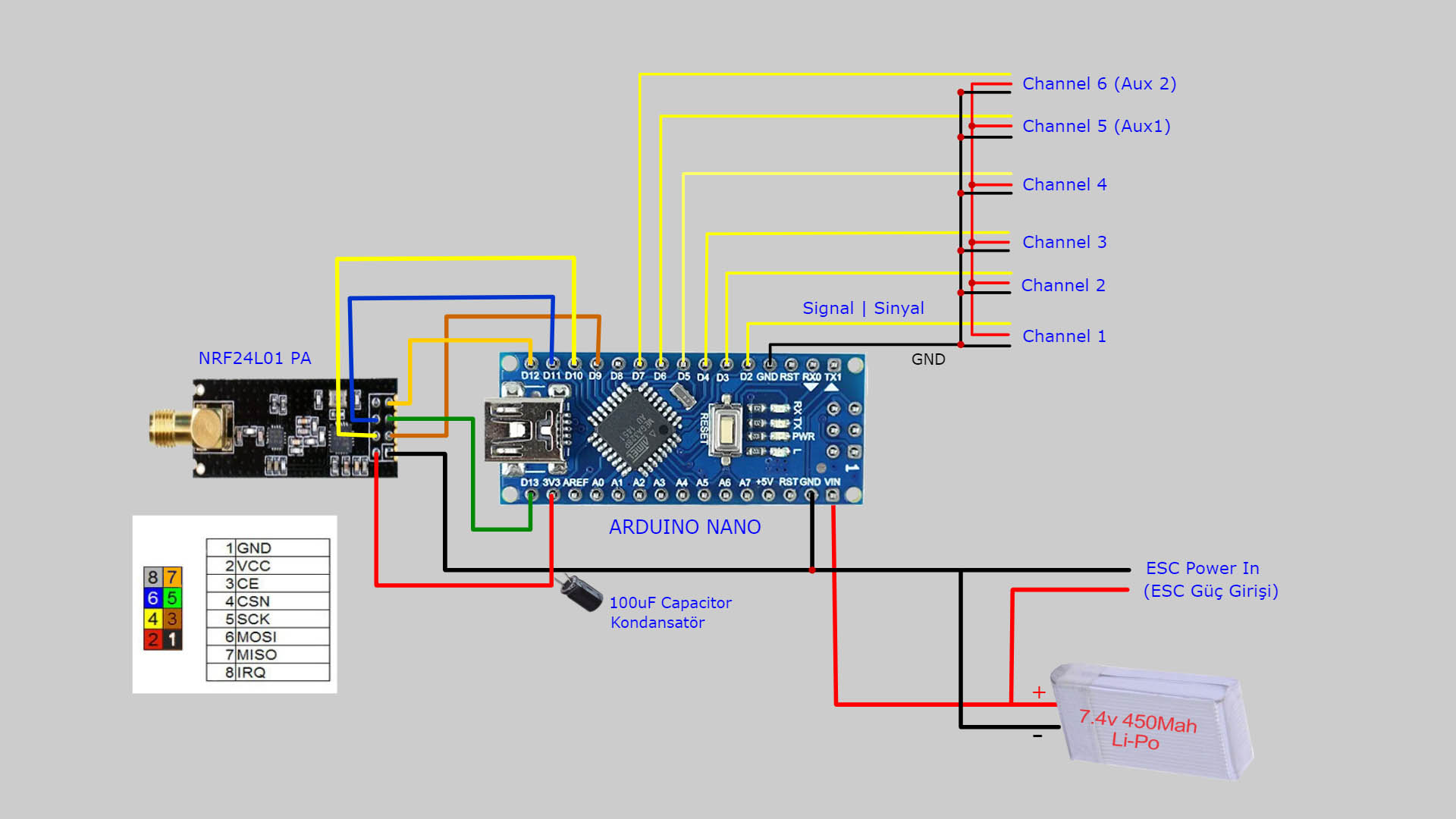
Not: Servolar gerekli gücü ESC üzerinden alır. ESC nin BEC özelliği gerekli 5V desteğini sağlar. Bu yüzden kanal portlarında VCC hattı Arduino ile bağlantılı değildir. Eğer Alıcıyı bir ESC ile birlikte kullanmayacaksanız haricen 5V güç kaynağı gerekli olacaktır.
Arduino İçin Alıcı Kodu:
// 6 Channel Receiver | 6 Kanal Alıcı
// PWM output on pins D2, D3, D4, D5, D6, D7 (Çıkış pinleri)
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
#include <Servo.h>
int ch_width_1 = 0;
int ch_width_2 = 0;
int ch_width_3 = 0;
int ch_width_4 = 0;
int ch_width_5 = 0;
int ch_width_6 = 0;
Servo ch1;
Servo ch2;
Servo ch3;
Servo ch4;
Servo ch5;
Servo ch6;
struct Signal {
byte throttle;
byte pitch;
byte roll;
byte yaw;
byte aux1;
byte aux2;
};
Signal data;
const uint64_t pipeIn = 0xE9E8F0F0E1LL;
RF24 radio(9, 10);
void ResetData()
{
// Define the inicial value of each data input. | Veri girişlerinin başlangıç değerleri
// The middle position for Potenciometers. (254/2=127) | Potansiyometreler için orta konum
data.roll = 127; // Center | Merkez
data.pitch = 127; // Center | Merkez
data.throttle = 12; // Motor Stop | Motor Kapalı
data.yaw = 127; // Center | Merkez
data.aux1 = 127; // Center | Merkez
data.aux2 = 127; // Center | Merkez
}
void setup()
{
//Set the pins for each PWM signal | Her bir PWM sinyal için pinler belirleniyor.
ch1.attach(2);
ch2.attach(3);
ch3.attach(4);
ch4.attach(5);
ch5.attach(6);
ch6.attach(7);
//Configure the NRF24 module
ResetData();
radio.begin();
radio.openReadingPipe(1,pipeIn);
radio.setAutoAck(false);
radio.setDataRate(RF24_250KBPS);
radio.setPALevel(RF24_PA_HIGH);
radio.startListening(); //start the radio comunication for receiver | Alıcı olarak sinyal iletişimi başlatılıyor
pinMode(6,OUTPUT);
}
unsigned long lastRecvTime = 0;
void recvData()
{
while ( radio.available() ) {
radio.read(&data, sizeof(Signal));
lastRecvTime = millis(); // receive the data | data alınıyor
}
}
void loop()
{
recvData();
unsigned long now = millis();
if ( now - lastRecvTime > 1000 ) {
ResetData(); // Signal lost.. Reset data | Sinyal kayıpsa data resetleniyor
}
ch_width_4 = map(data.yaw, 0, 255, 1000, 2000); // pin D5 (PWM signal)
ch_width_2 = map(data.pitch, 0, 255, 1000, 2000); // pin D3 (PWM signal)
ch_width_3 = map(data.throttle, 0, 255, 1000, 2000); // pin D4 (PWM signal)
ch_width_1 = map(data.roll, 0, 255, 1000, 2000); // pin D2 (PWM signal)
ch_width_5 = map(data.aux1, 0, 255, 1000, 2000); // pin D6 (PWM signal)
ch_width_6 = map(data.aux2, 0, 255, 1000, 2000); // pin D7 (PWM signal)
// Write the PWM signal | PWM sinyaller çıkışlara gönderiliyor
ch1.writeMicroseconds(ch_width_1);
ch2.writeMicroseconds(ch_width_2);
ch3.writeMicroseconds(ch_width_3);
ch4.writeMicroseconds(ch_width_4);
ch5.writeMicroseconds(ch_width_5);
ch6.writeMicroseconds(ch_width_6);
}
Kodlardaki “include satırlarında yer alan .h uzantılı dosyalar kütüphane dosyalarıdır. Onları isimleri ile aratın. Bilgisayarınıza indirin ve Arduino/Libraries klasörüne koplayın. (Bunu kodu arduinoya yüklemeden önce yapmalısınız)
Örnek: NRF24L01 için gerekli kütüphane linki : https://github.com/maniacbug/RF24 (Arduino kartına göre farklı versiyon kütüphane dosyaları gerekebilir. Deneyerek bulunabilir)
_______________ OPSİYONEL PDF ve GERBER DOSYALARI _____________________ :
6 Kanal Alıcı:
6 Kanal Alıcı (3.3V Regülatörlü):
Arduino pini haricinde 3.3V ile beslenen NRF24L01 modülü daha kararlı çalışır.
PDF & Gerber Files Download Link: https://drive.google.com/file/d/1VyXv-6hAfo4b46m2h7WYzhAJbsuA_ZBU/view?usp=sharing