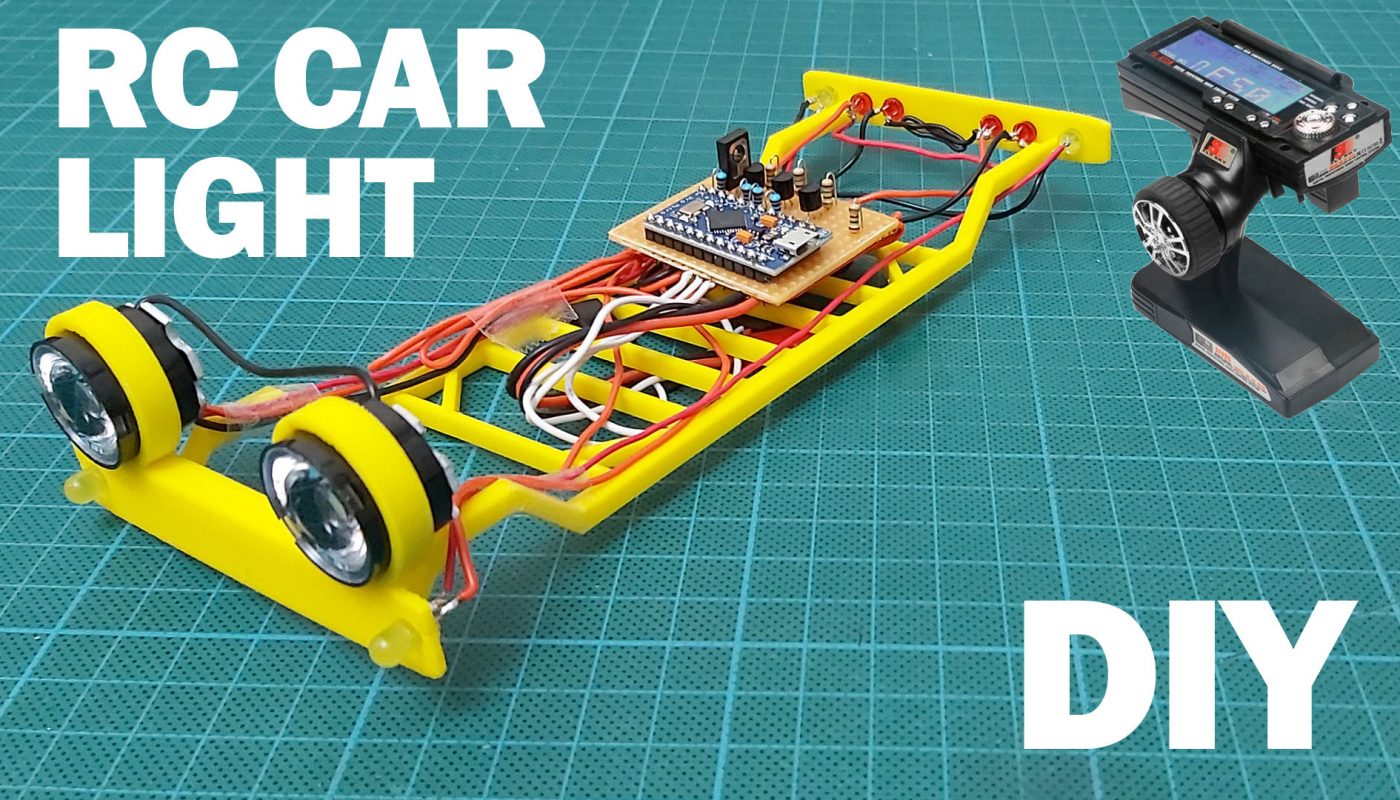
RC car light system circuit. Diy remote control light module (signal, brake, headlight) for RC cars.
PCB Board: https://www.banggood.com/custlink/mmKEIObyOR
Arduino Pro Micro: https://www.banggood.com/custlink/DG3RZLbhOV
S8050 NPN Transistor: https://www.banggood.com/custlink/vmGYilAYjl
4.7R Resistor (1W or 2W): https://www.banggood.com/custlink/mvvh8jQEe5
5mm Leds: https://www.banggood.com/custlink/v3mh8LNYgj
Power Led (1W): https://www.banggood.com/custlink/3mKhZlAdee
150R and 1K Resistors: https://www.banggood.com/custlink/m3DySaARUA
BD139 NPN Transistor: http://bit.ly/3jpaCHb
Flysky FS-GT3B Radio control: https://www.banggood.com/custlink/vmmy8lAYAV


RC Car Light system Code:
unsigned long TIME1=0;
unsigned long TIME2;
bool LEDSTATUS = false;
int SIGNAL;
int BRAKE;
int HEADLIGHT;
void setup(){
pinMode(21, INPUT); // Throttle Channel | Gaz Kanalı
pinMode(20, INPUT); // Steering Channel | Direksiyon Kanalı
pinMode(19, INPUT); // Channel 3 | 3. Kanal
pinMode(5, OUTPUT); // Signal Leds | Sinyal ledleri
pinMode(6, OUTPUT); // Signal Leds | Sinyal ledleri
pinMode(9, OUTPUT); // Headlights | Far ledleri
digitalWrite(5, LEDSTATUS);
digitalWrite(6, LEDSTATUS);
}
void loop(){
BRAKE=pulseIn(19,HIGH);
SIGNAL=pulseIn(20,HIGH);
HEADLIGHT=pulseIn(21,HIGH);
if (SIGNAL>1600)
{
digitalWrite(5, LOW);
unsigned long TIME2 = millis();
if (TIME2 - TIME1 >= 350) {
LEDSTATUS = !LEDSTATUS;
digitalWrite(6, LEDSTATUS);
TIME1 = millis();
}
}
if (SIGNAL<1400)
{
digitalWrite(6, LOW);
unsigned long TIME2 = millis();
if (TIME2 - TIME1 >= 350) {
LEDSTATUS = !LEDSTATUS;
digitalWrite(5, LEDSTATUS);
TIME1 = millis();
}
}
if (BRAKE>1800) digitalWrite(3, HIGH); else digitalWrite(3, LOW);
if (HEADLIGHT>1600) digitalWrite(9, HIGH); else digitalWrite(9, LOW);
}