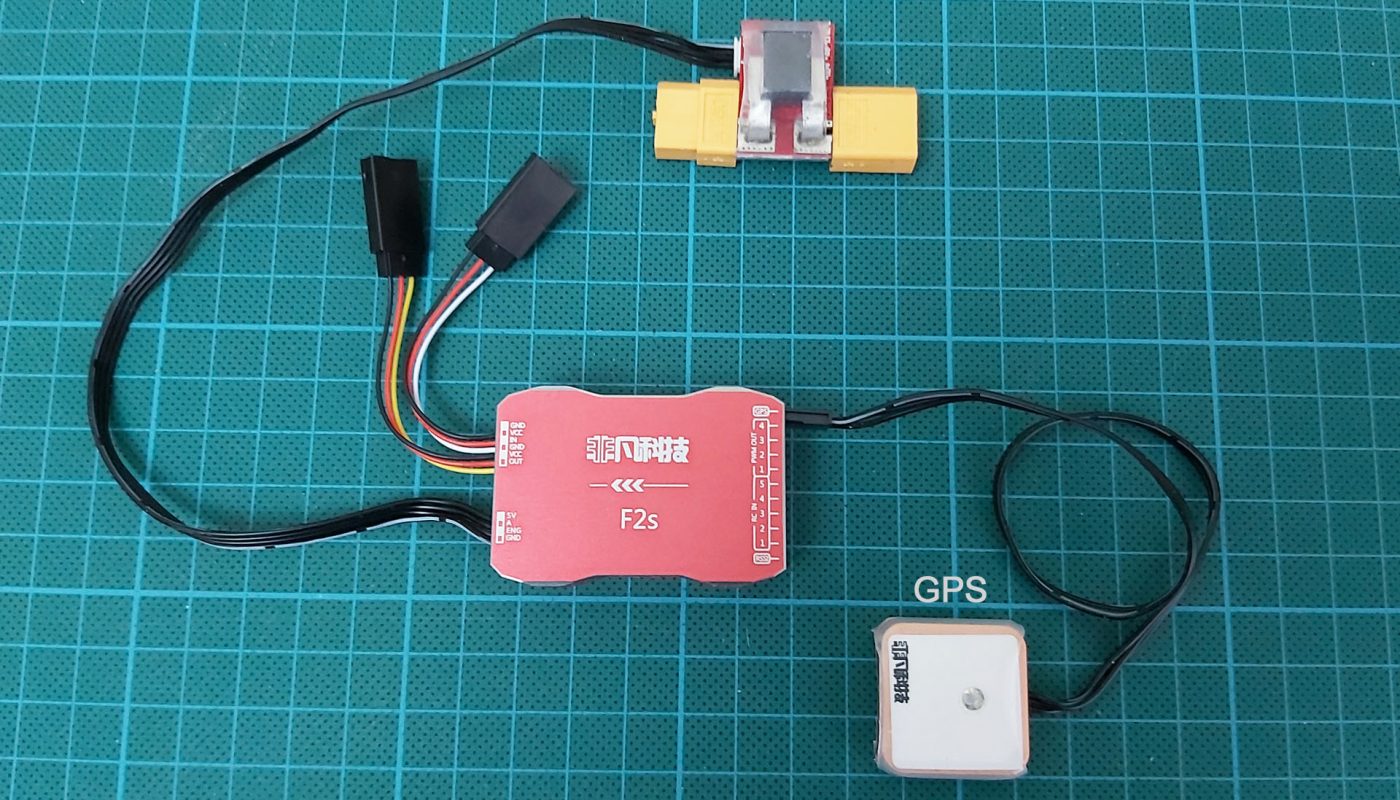
There are various gyro and auto pilot systems used in model aircraft. F2S is an flight control system with GPS support. It is also a useful system for FPV aircraft thanks to its OSD feature.
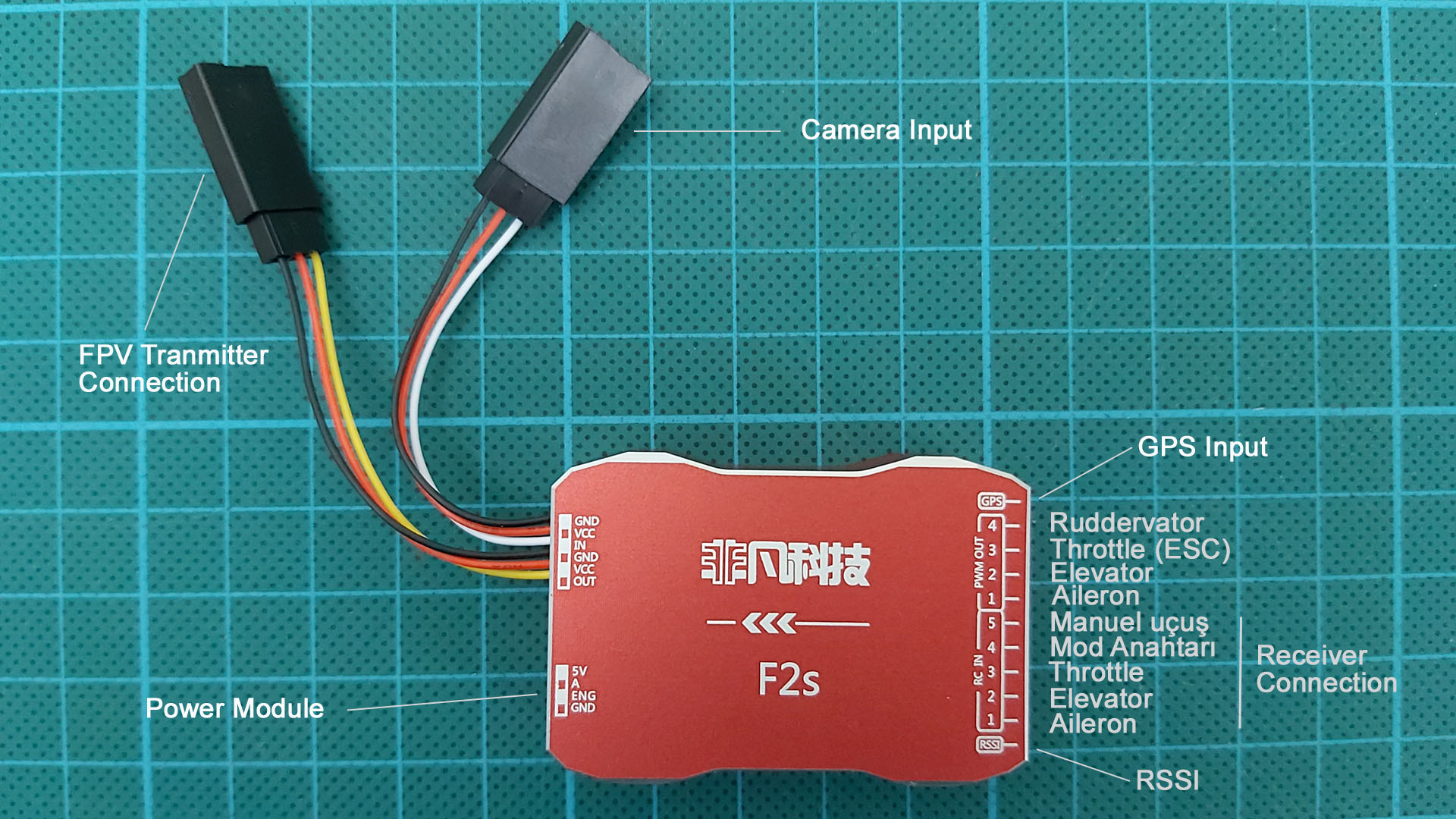
F2S Flight Controller consists of 3 parts. Gyro Module, M8N GPS and XT60 Galvonometer (Current and Voltage meter). Since OSD support is available, it has Camera input and FPV Transmitter Output.
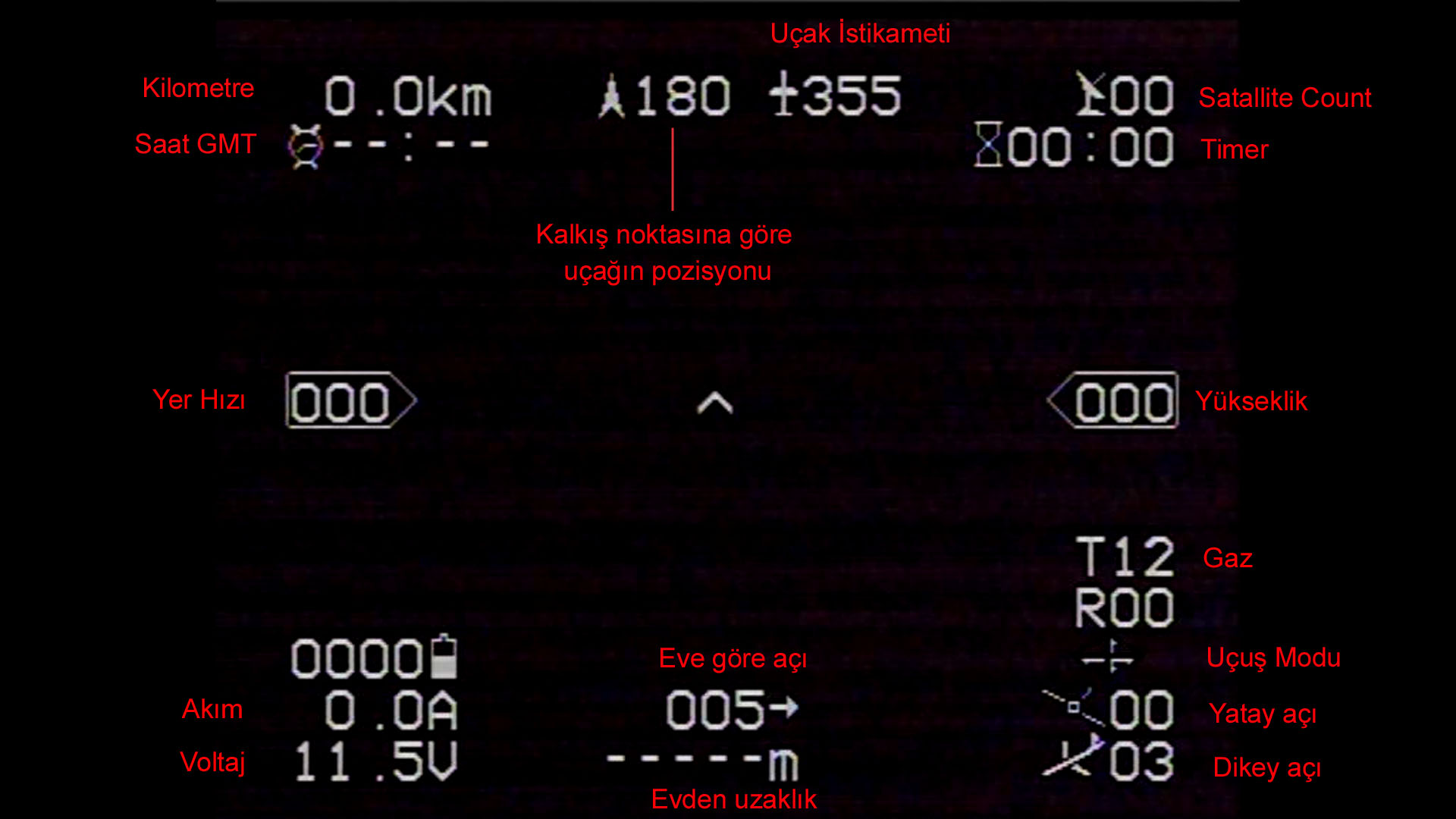
OSD (On Screen Display) allows us to see flight data such as altitude, speed, distance, battery voltage, current in real time on the FPV screen.

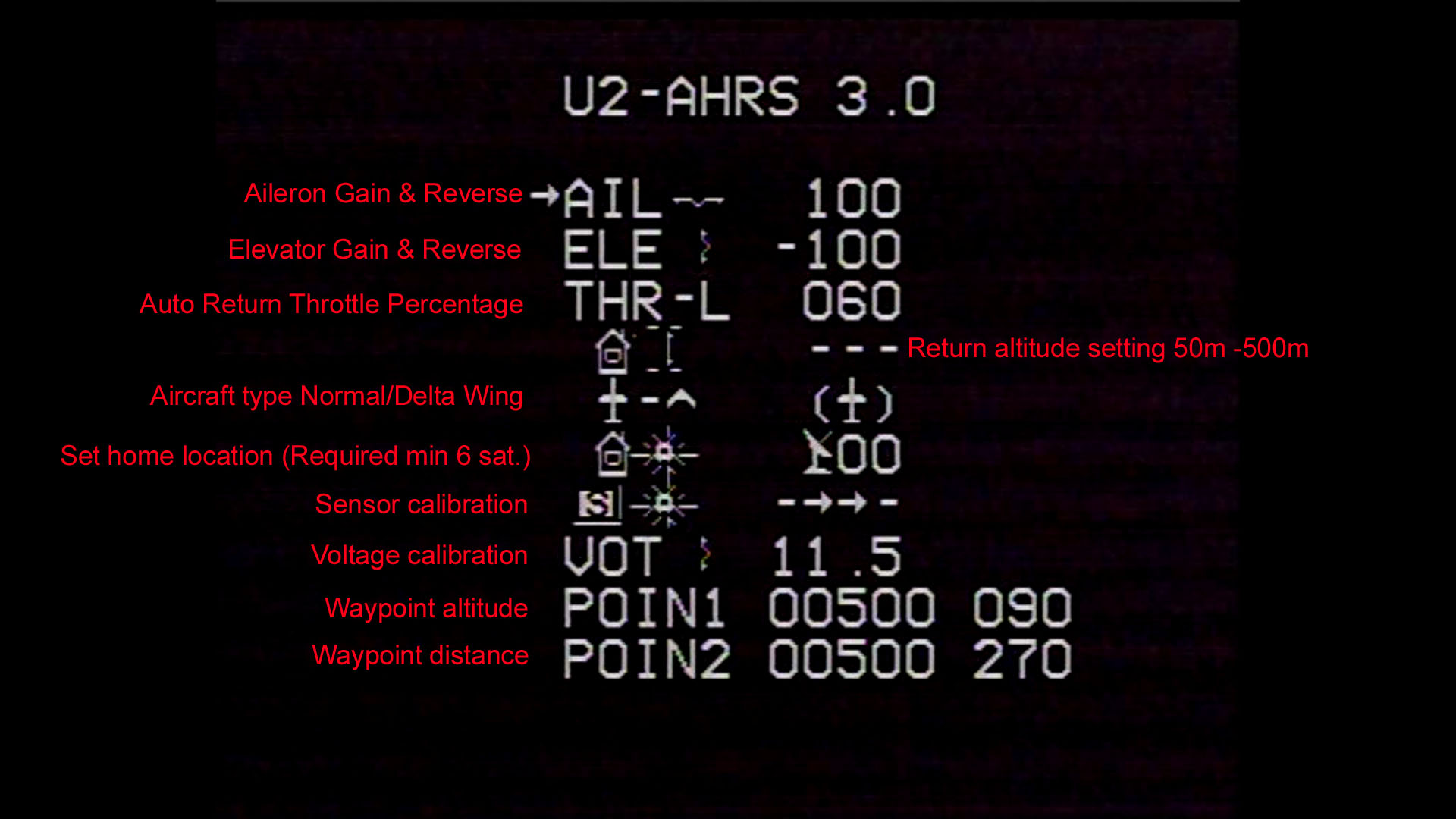
Configuration on screen display:
To access this screen, the FPV screen and Camera must be running. Entry takes place when the remote control’s Aileron stick is held to the lower-right side for 5 seconds. The up and down movements with the Aileron bar enable navigation in the menu. Right and left provide entry and exit.
FPV Screen OSD Data:
F2S Flight Control System Flight Modes:
1. Balance mode: Three-stage switch, in high position.
The aircraft is responsible for the position depending on the location. The plane corrects itself when the joystick is released.
2. Lock mode (on version 2.0): Three-stage switch in middle position.
When the joystick returns to the midpoint, the flight controller automatically locks the direction or altitude mode, when it exceeds the midpoint, it switches to balance mode. So when we do not command via the control, the flight continues in lock mode. Lock mode can realize 4 kinds of flight modes, such as fixed altitude directional flight, non-fixed altitude non-directional flight, directional variable altitude flight, and balance mode.
3. Return-to-Home mode: three-stage switch, in low position.
It provides automatic home return with the determined gas (Speed) ratio. With this mode, the flight takes place completely automatically.
Manual control: The full manual mode. Control connection should not be used except for those with advanced flight and the connection should be left blank (manufacturer’s recommendation).
– When the Return Home mode is activated, the airplane reaches the preset height. When it reaches its starting position with automatic flight, it starts circular flight.
– Not controlled by Rudder Flight Controller. Rudder servo must be connected directly to the receiver.
Positive:
The Return Home feature works very well if there is enough satellite connection. OSD information is comprehensive. Gyro stability is good.
Negative:
The menu is not very detailed. Setting possibilities are limited.

